1 Introduction
This article refers to the address: http://
Accurate measurement of battery residual capacity has been a critical issue in the development of electric vehicles. An effective battery management system contributes to an increase in battery life. Therefore, the accurate estimation of the battery SOC becomes the central problem of the electric vehicle battery energy management system. If the SOC of the battery can be correctly estimated, the power provided by the battery can be reasonably utilized to prolong the service life of the battery pack.
The scheme adopts a bus-type networking, and the field bus is used to complete data exchange between the nodes. In the distributed solution, the multi-energy controller is the master ECU, which communicates with multiple lower ECUs via the field bus. During the working process, the communication sub-module of each controller runs in the background in the form of a timer or an interrupt, completes the data transmission and reception, and saves the main process resource expenditure. As shown in Figure 1.
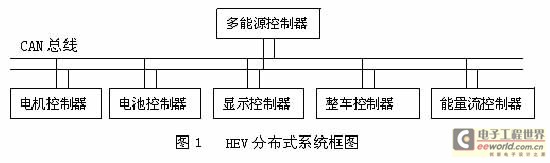
The SOC value of the battery is sent by the battery controller to the multi-energy controller through the CAN bus, and the working mode of the whole vehicle is that the multi-energy controller determines the information of each ECU through a certain logic algorithm. Once these parameters are determined, we can decide whether to start the engine or shut down the engine, or to determine which state the motor should be in. For example, when the SOC value of the battery is between 50% and 70%, at this time, the multi-energy controller calculates that the whole vehicle working mode is in the starting mode, then it means that the current system has sufficient electric energy, no need to turn on the engine, and the motor It can work in a drive mode.
2 system hardware components
As shown in Figure 2, the battery controller can communicate with other control systems in an external vehicle via a CAN bus network. A battery management ECU (Electronic Control Unit) and four battery pack information detection ECUs; the single cells we use are combined into 24 battery packs. We configure one measurement unit for each of the six battery packs, that is, the shared battery packs ECU1 to ECU4. The four battery pack ECUs and the battery pack ECU form a CAN bus network, and one CAN controller and battery pack ECU form the CAN inside the battery management system. The network, another CAN controller and other control systems in the car constitute a complete vehicle fiber CAN bus network.
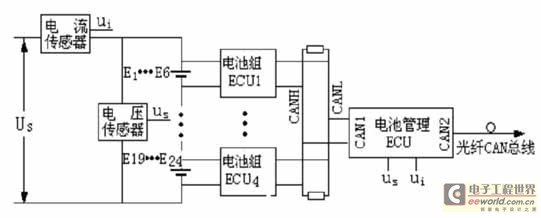
Figure 2 Block diagram of the battery management ECU
As shown in Figure 3, the embedded microcontroller used in the battery pack ECU is the P87C591 microcontroller, which integrates the CAN controller and the A/D analog-to-digital conversion module. Each battery pack ECU manages six battery packs. The completed function is to measure the voltage and temperature information of the six battery packs, and send the collected information to the battery management ECU through the CAN bus. The voltage of the 6-channel battery pack is connected to the 6-channel A/D input port of P87C591 through the voltage conditioning circuit. The signal line of the 6-channel temperature sensor is connected to the same IO port of the P87C591.
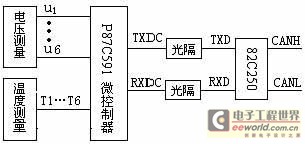
Figure 3 Circuit diagram of the battery pack ECU
3 CAN interface circuit design
In this design, P87C591 is used as the microcontroller. Among them, the interface circuit design of P87C591 and CAN driver chip is shown in Figure 4. Mainly composed of P87C591, photoelectric isolation circuit, CAN drive and other three parts. Optical isolation circuit: In order to further suppress interference, the optical bus interface is often used in the CAN bus interface. The optical isolator is generally located between the CAN controller and the transceiver.
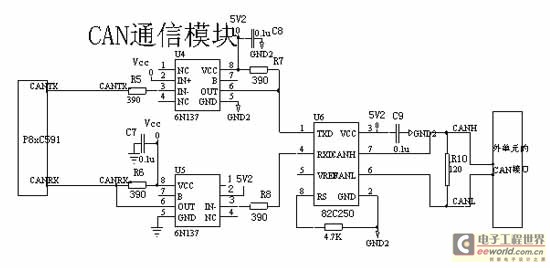
Figure 4 CAN communication module hardware design circuit diagram
The system general program includes an initialization program and a main loop program, and its flowchart is as shown in FIG. 5:

Figure 5 main program diagram
The system first powers up, then initializes the CAN and the timer, the system waits for the interrupt, if there is an interrupt, judges the interrupt type, if it is the interrupt of the SJA1000 controller, reads the data of the SJA1000 controller, and releases the buffer, and the operation is completed. The interrupt returns. If the timer is interrupted for 50ms, the voltage and current data are AD-converted, the SOC value is calculated, and the relevant data is sent by the CAN.
4 Conclusion
The data communication technology based on CAN bus has high reliability, real-time and flexibility. CAN bus has broad application prospects and development space in the application of NiMH battery management system for hybrid electric vehicles.
SVLEC industrial heavy duty connectors provide reliable and pluggable power, signal and data transmission to meet the highest requirements. In addition to the rectangular heavy-duty standard design, SVLEC also provides modular, compact and lightweight connectors, providing a wide range of solutions for the connection of machinery, transportation, energy, automobiles and equipment. The new generation of SVLEC products brings intelligence into the connector field.


Heavy Duty Connector,Battery Magnet Connector,Heavy Duty Module Electrica,High Voltage Electrical Connectors
Kunshan SVL Electric Co.,Ltd , https://www.svlelectric.com