Intelligent traffic lights are the development direction of traffic management and traffic flow control in the future. It can more effectively limit, adjust and guide traffic flow to improve traffic efficiency and ensure traffic safety.
By integrating the advantages and disadvantages of various current traffic lights, this design proposes a complete set of new intelligent traffic light design scheme based on video surveillance for the actual situation of domestic vehicles, randomness and many influencing factors. Video capture, image processing and control modules are composed. The FPGA core is used to build a dedicated high-speed video acquisition module. The DSP processor is used for real-time image calculation. The vehicle traffic information is extracted by the image algorithm, and finally the fuzzy algorithm is used to realize intelligent control.
1, system design overviewThe system has completed the design of a new type of intelligent traffic light, which is divided into three parts: video acquisition module, video analysis module and control module. The system integrates streamlining, high efficiency, intelligence and practicability. Its system structure block diagram is shown in Figure 1. The video acquisition module is based on FPGA, and its high-speed parallel logic operation capability is used to control the timing of CMOS image sensors and efficiently store and transmit image data.
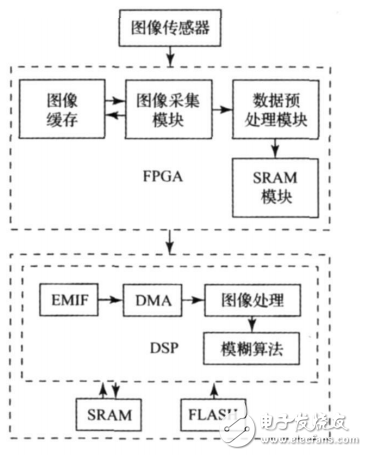
Figure 1 System structure
The image processing module is based on DSP. Its rich hardware computing components and enhanced CPU multi-bus structure are used to process image data and analyze traffic flow status in real time.
The control module is mainly composed of a software control algorithm and a DSP port. This reserved control interface can be connected to different driving circuits to control different signal lights.
2, video capture moduleThe block diagram of the video acquisition module is shown in Figure 2. The entire module is based on the FPGA, and the CMOS image sensor and SDRAM memory are extended peripherally.
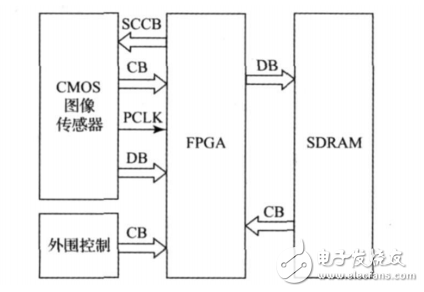
Figure 2 video capture module structure
The control signal terminal and data signal terminal of the CMOS image sensor OV7660 are directly connected to the FPGA, and the timing operation of various commands of the OV7660 is accurately completed by nearly 400 state machines. In order to coordinate the processing rate of each module, the acquisition process buffers the image data in units of frames, and opens a buffer space in the SDRAM to store the current frame and the previous frame, and performs the previous frame reading when the current frame is written.
The DSP simulates the FPGA as an external SRAM for image frame reading through the EMIF interface. Image data is sent to the image processing module using a timer controlled DMA.
The signal link is streamlined and efficient, greatly exploiting the advantages of FPGA timing control, and improving the stability of data transmission by optimizing the cache scheme, laying a solid foundation for back-end image data analysis.
3, image processing moduleTraffic flow detection is an important part of intelligent transportation systems. The analysis of traffic flow through video images has greater advantages than other methods, such as low cost, system simplification, adaptability, and scalability. The main goal of the image processing module is to achieve foreground separation, ie to separate out stationary backgrounds and relatively moving vehicles.
Traditional moving target detection methods include optical flow method, interframe difference method and background difference method. The background difference method is one of the most commonly used foreground detection methods. The background difference method subtracts the background reference frame from the current frame, and then selects the appropriate threshold binarization for the difference image to obtain the moving target.
The effect of background difference detection on moving targets depends to a large extent on the quality of the background image. The background image will change with illumination and other factors. The key to the background difference method is to find an adaptive update algorithm for the background model. The system uses the mean method to obtain the initial background image, uses the Kalman filter principle to establish the background model, and the OTSU algorithm performs the binarization of the image. The block diagram of the image processing module is shown in Figure 3.
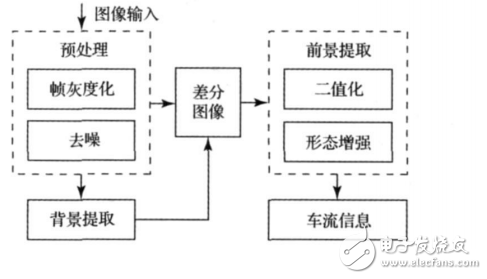
Figure 3 video image processing flow
3.1, frame grayingThe DSP reads the color image data of 16-bit RGB565 format from the dual-port RAM. In order to improve the speed of image processing while preserving most of the details of the image, the brightness information in the image can be extracted and converted into YUV format. Where the brightness information:
Y=0.299xR+0.587xG+0.114xB
The processing effect is shown in Figure 4(b).
3.2, denoisingThe original image captured by the camera usually contains salt and pepper noise and white noise. Salt and pepper noise is the noise caused by sensors, transmission channels, etc. White noise is random signal interference in the frequency sense, obeying Gaussian distribution. In order to improve the subsequent processing effect, the original image must be denoised. The denoising operation will also reduce the image quality to a certain extent, so there should be a reasonable trade-off in method selection.
The system uses 3x3 sliding window median filtering for denoising, which has obvious denoising effect and can better preserve image edges. Although median filtering performs generally, it has little effect on real-time performance.
The 3x3 data sequence is divided into 3 groups, and the maximum value group, the median group, and the minimum group are obtained, and then the minimum value of the maximum value group, the median value of the median group, and the maximum value of the minimum value group are 3 values. The median is taken and the result is the median of the sequence. The processing effect is shown in Figure 4(c).
The water glass shell process has low cost, simple operation, and low requirements for raw materials. The basic feature of the process is the use of paraffin-stearic acid low-temperature mold material, and the use of water glass as the binder in the process of shell making. In terms of shell process, its surface quality is average, and its dimensional accuracy is not as high as that of silica sol process, but because of its unique cost, it is widely used in some civil and low-precision internal combustion engines in my country.
Sand Casting,Iron Sand Casting,Oem Sand Casting,Cast Iron Sand Casting Parts
Tianhui Machine Co.,Ltd , https://www.thcastings.com