Boston Dynamics is another great company born out of the Massachusetts Institute of Technology. It not only developed robots with animal power and agility in action, but also developed other robots capable of climbing vertical walls and being able to operate in tight spaces. Deformation robot. All of these devices are capable of magnifying and improving the ability of animals and humans to perform tasks like Superman.
This article focuses on one of these creations, the BigDog, a four-legged, three-foot-high, three-foot-long, 240-pound dog-like robot that climbs a muddy slope and carries 340. The weight of the pound.

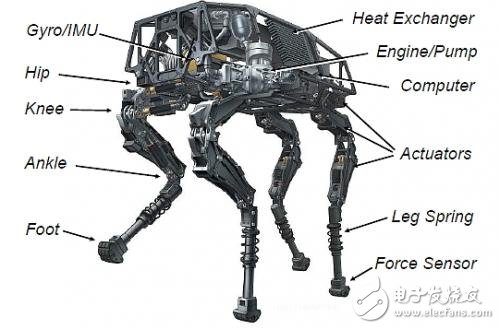
BigDog is a dog-type robot with four legs, three feet high and three feet long and weighs 240 pounds (Photo courtesy of Boston Dynamics)
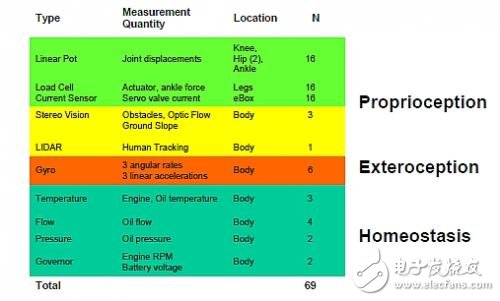
A total of 50 sensors feed the computer to help maintain the balance and direction of the robot (Photo courtesy of Boston Dynamics)
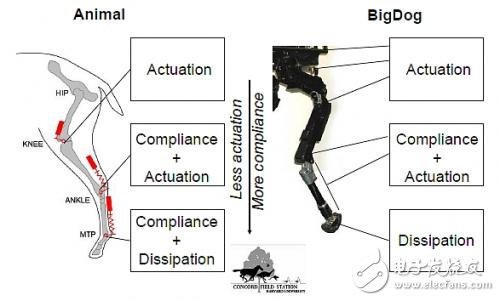
BigDog uses a 15-horsepower micro-racing engine. The engine consists of a two-stroke/single-cylinder engine that operates in a water-cooled manner that powers the hydraulic system to control the four legs of the robot. These legs are designed by the designer to mimic the natural movements of large mammals.
The robot's legs are designed by the designer to mimic the natural movements of large mammals. (Photo courtesy of Concord Field StaTIon, Harvard University)
A total of 50 sensors feed the computer to help the robot maintain balance and direction and help the robot recover when it falls or is forced to deviate from the established route.
Important external features of BigDog are key to performance (Photo courtesy of Boston Dynamics)
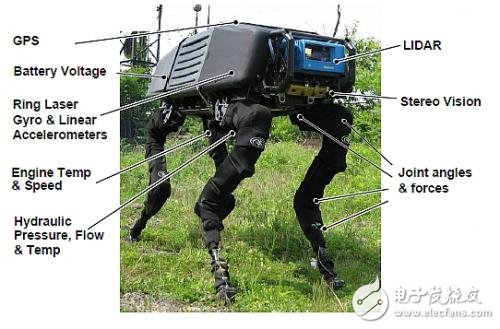
Inertial sensorInertial sensors are used to measure the dog's posture and acceleration, and joint sensors measure the actuator action and force working at the joint. The onboard computer collects information from these sensors and provides an estimate of how BigDog moves in space. There are other sensors that monitor the dynamic balance of BigDog: hydraulics, flow and temperature, engine speed and temperature.
Robots perceive space through numerous sensors (Photo courtesy of Boston Dynamics)
In the M. Wonders Masters paper "The body and the senses: the percepTIon of space" published in WordPress, Brian Massumi is quoted and he introduces three different levels in our body. How does it feel about our real-life experience? He refers to these three levels as external feelings, proprioception and inner feelings. External sensations include sight, hearing, touch, taste and smell. Massumi believes that the proprioception “converts the action and relaxation of the body when encountering an object into the associated memory of the muscleâ€, while the inner feeling is also called the inner feeling. “The stimuli collected by the five external sensations are immediately recorded, even in Before they are completely processed by the brain." These three different layers also correspond to three different types of subject-objective relationships.
1.0mm Wire To Board Connectors
ShenZhen Antenk Electronics Co,Ltd , https://www.antenkconn.com